


週刊ロビ、前回作ってから、ずっと組み立てずに積み重なっていたので、、GWの今日思い立って今届いている61号まで一気に組み立ててみました。

22号まではこんな感じで両手が完成してます。

23号は右足首サーボモーター(横回転)のID書き込み。結構、サーボモーターが届いてIDを書き込む号は多いです。それだけ可動部が多いということですが。
24号は右足首カバー、足首サイドパネル、足首ジョイントが届き、

サーボモーターに右足首カバーを取り付け
25号は足首テープ、右足首フレームなどが届き、
サーボモーターに右足首フレームを取り付け

26号は右足首サーボモーター(縦回転)が届き、IDの書き込み、足首テープを貼ります。テープでモーターの色を足首の色に合わせるとか芸が細かいですね。

27号は右足カバー、右足パネルなどが届き、

右足首の関節と足を組み立て。

28号は右すね外側カバー、右すねフレームなどが届き、

右すね外側を組みたて。
29号は右ひざサーボモーターが届いて、ID書き込み。

30号は右すね内側カバー、右ひざフレームが届いて、

右ひざの関節を組み立て。

31号は股関節サーボモーターが届いて、IDを書き込み、右脚に取り付け。

32号は右股関節内側フレームが届いて、

右脚に右股関節内側フレームを取り付け。
33号は右股関節(横回転)サーボモーターが届いて、ID書き込み。
これはかなり後に使うものになるのに、なぜここで届くのだろう?

34号はモップシューズの材料が届き、

モップシューズを組み立てます。

35号から37号までは、23号から25号までの左脚バージョンです。

38号ではリチウムイオンバッテリーが、

39号は充電器、

40号は分電盤とヒップカバーが届きます。この辺りは特に組み立てはないです。
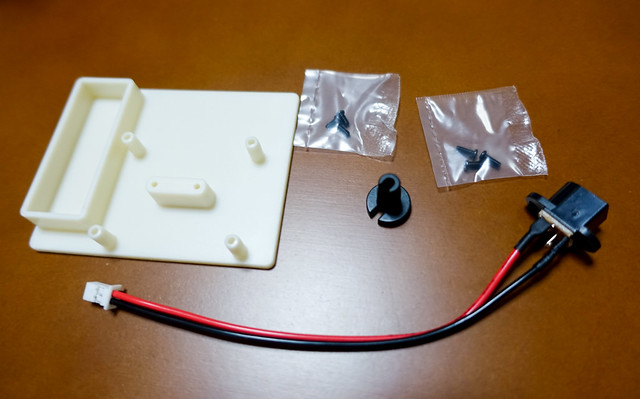
41号はマイコンボードプレート、充電ジャックケーブル、サーボ取り外しピンが届き、
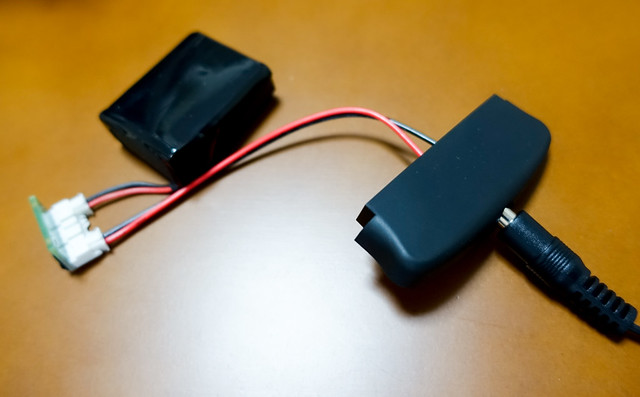
充電器、ヒップカバー、分電盤、バッテリーをつないで、バッテリーを充電します。

充電器のインジケーターが赤から緑になれば充電完了。

42号はテスト用microSDカードが届きます。

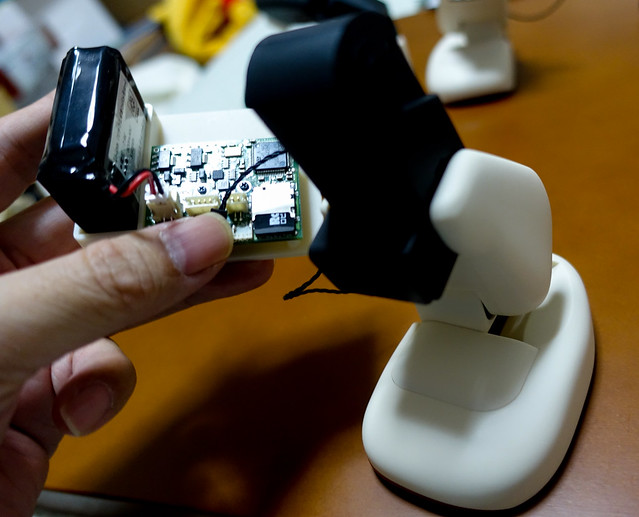
43号はマイコンボードが届くので、

右腕の動作テストができます。今まで組み立てるばかりだったので、動作しなかったら全部分解して組み直しなのかなと心配していましたが、ちゃんと途中でテストできました。

44号は左足首(縦回転)サーボモーターが届くので、IDを書き込みます。
また左腕の動作テスト。ここで全く動かない症状が。ちゃんとトラブルシューティングのやり方も書いてあるので、分解しつつ、テストを繰り返します。モーターの接触不良だったようで、ちゃんと動くようになりました。

45-49号は27-31号の左脚バージョン


適宜テストも行っていきます。腕なども最初からテストできるようになっていれば戻りが少ないと思うのですが、かなり後でマイコンボードや充電池などが届くのは高価な部品だからかな?

50号は、左股関節外側フレーム、右股関節外側フレーム、左股関節内側フレームなどが届くので、左右股関節フレームの取り付けと右股関節の組み立てを行います。33号でIDを書き込んだサーボモーターはここで使います。
51号は、股関節(横回転)サーボモーターにIDを書き込んで、右足に取り付けます。

52号は、腰フレーム、下腹カバー、ボールなどが届きます。

腰に両足を取り付け、動作を確認します。
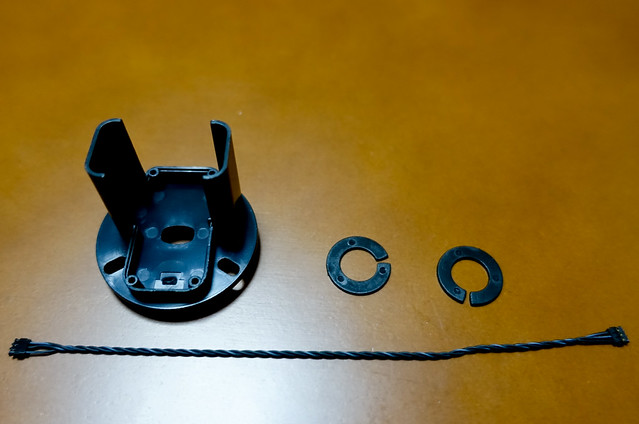
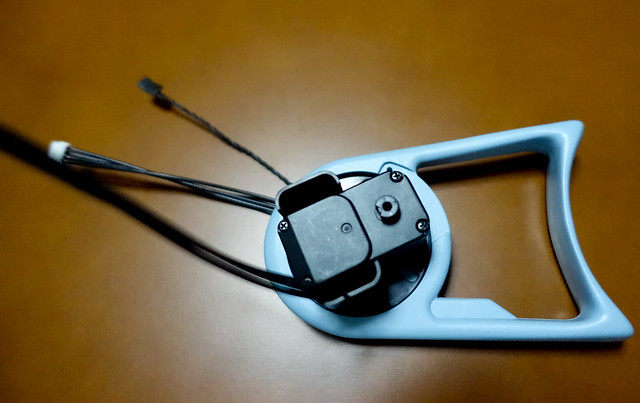
53号は、ネックフレーム、首用ワッシャーなどが届くので、マフラーを取り外して、マフラーにネックフレームを取り付けます。
54号は、首(旋回)サーボモーターが届くのでIDを書き込みます。

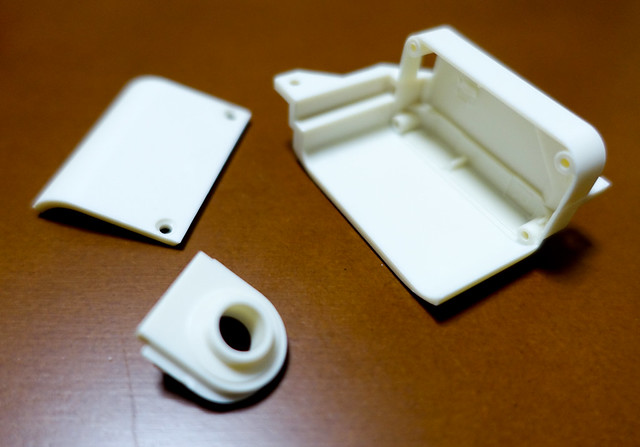
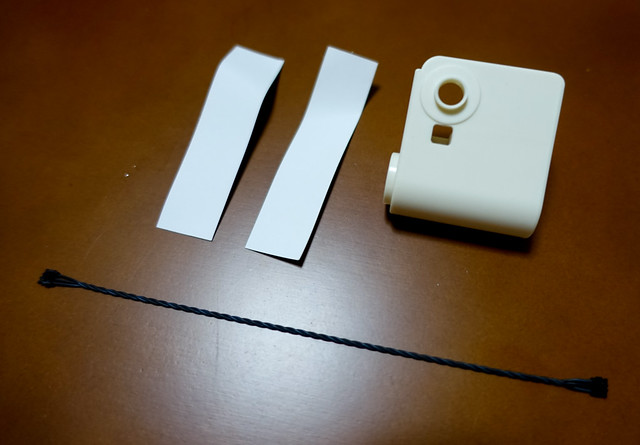
55号はスピーカー、スピーカーステー、スピーカーカバーなどが届くので、

胸にスピーカーを取り付けます。

56号は、音声認識ボードケーブル、L字形サーボホーンなどが届き、
マフラーに首(旋回)サーボモーターを取り付けます。

57号は、スイッチ、マフラーリンク金具などが届き、マフラーにスイッチを取り付け、左右のボディを組み合わせます。

58号は、腰用サーボモーターが届くので、IDを書き込み、ボディに取り付けます。
ここで、テストすると頭が動かないトラブルが。分解して調べるとやはりサーボモーターの接触不良だったようで、接点を調整すると動くようになりました。

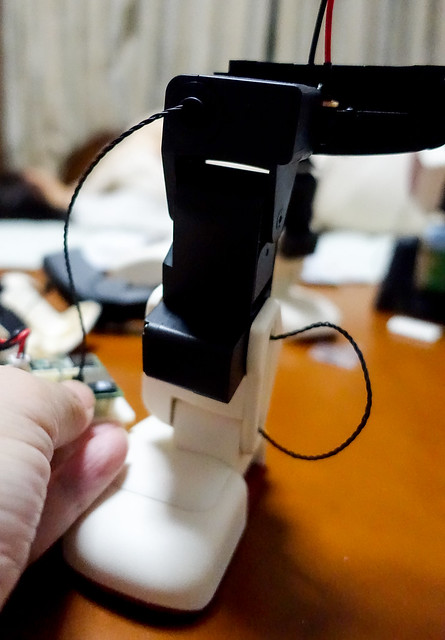
59号はネックサーボホルダー、ネッククランクアーム、ブッシュ、フェルトソールなどが届くので、

首にネックサーボホルダー、ネッククランクアーム、足裏にフェルトソールを取り付けます。
60号は首用(横回転)サーボモーターが届くので、IDを書き込み、上半身に取り付けます。

61号はヘッドバース、スライダーサーボーホーン、クランクサーボホーンなどが届き、

首に取り付けます。
動作させるとよくわかるのですが、サーボモーターを使って自在に手、脚、頭を動かす仕組みは非常に面白いと思いました。
あともう少しですが、届いているのがここまでなので、ここで一旦終了。
組み立て中の動作テストの様子を動画でも載せておきます。

ピンバック: 二足歩行ロボット「週刊ロビ」が出来ていく過程を見ていると鉄腕アトムの誕生のシーンを思い出す | ブロガーセレクション
ピンバック: デアゴスティーニ ロビ | Digital Life Innovator