


Makuakeで9277%達成したプロジェクト「初心者もプロも楽しめる!自作できるロボット犬『Mini Pupperミニぷぱ』」の応援リターン品「コンプリート・キット+OpenCVカメラ」と「LiDARモジュール」が届きました。四足歩行ロボットといえば、Petoi Bittleを試してみたり、本業でUnitree A1やSpotを使ってみたりしてますが、Mini Pupperはカスタマイズ性も高くて個人で色々遊べそうかなと。

3月末お届け予定だったのが、3月中旬に届きました。ただ4月以降の分については新型コロナの影響で遅れるかもという状況のようです。


まず見えるのが、下記のようなもの。
・PS4コントローラー
・Raspberry Pi 4B
・V2カスタム回路基盤
・OAK-D-Lite 3Dカメラモジュール(OpenCVカメラ)
・LiDARモジュール
・microUSBケーブル x2

白い箱を開けるとMini Pupperを作るための色々な部品が入っていました。
・バッテリー
・サーボモーター
・カーボンファイバー部品
・様々な種類のネジ、軸受など
・LCDディスプレイ
・ファン
・3Dプリントシェルパッケージ
・3Dプリントベーシックパッケージ
・microSDカード32GB
・六角レンチ、プラスドライバー、スパナなどの工具
とっても細かく長さが違うネジなど大量にはいっていたりして、少しビビったり。少しですが予備のものも入っています。
こちらのガイドを参考に組み立てます。でも、あまり詳しいことは書いていなかったりするので少し迷いました(一度全体を読んだ方が意味が分かったりします)。

Rasberry Pi 4 Model B 2GBRAMとV2カスタム回路基盤
この基盤用のイメージファイルをダウンロードして、microSDに書き込みます。

macでbalenaEtcherを使って書き込みました。
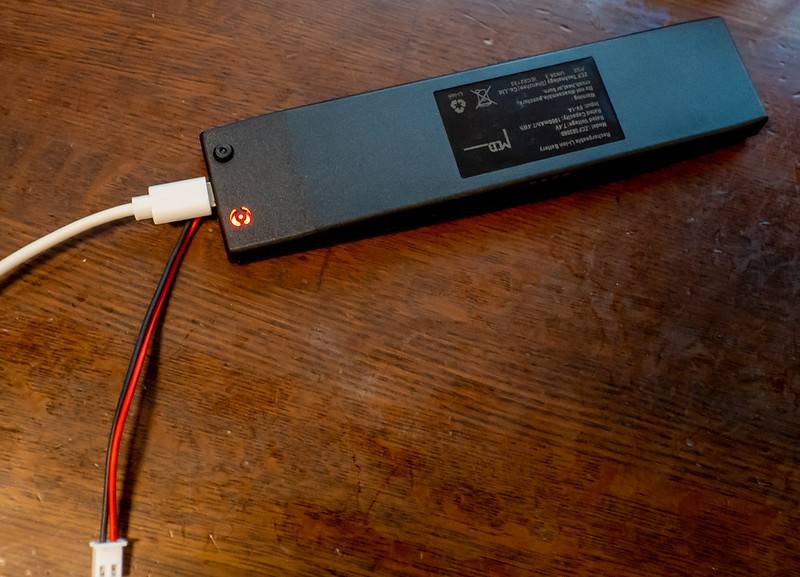
バッテリーを充電。

説明に書かれている部品やネジ、ナット、ベアリングなどを見つけて組み立てていきます。

脚の部分ですね。可動部になるので、必須ではないけどロックタイトでナットを固定したほうが良いと書かれています。
別途用意しなければならないものもあるので注意ですね。

ねじロック222(609円)と六角レンチ(99円)をAmazonで注文したらすぐに届きました。

六角レンチはこちらのサーボモータの固定に必要ですが、付属のものだと届かない。
2mmの六角レンチが必要と書かれていましたが、1.5mmのものがちょうどでした。
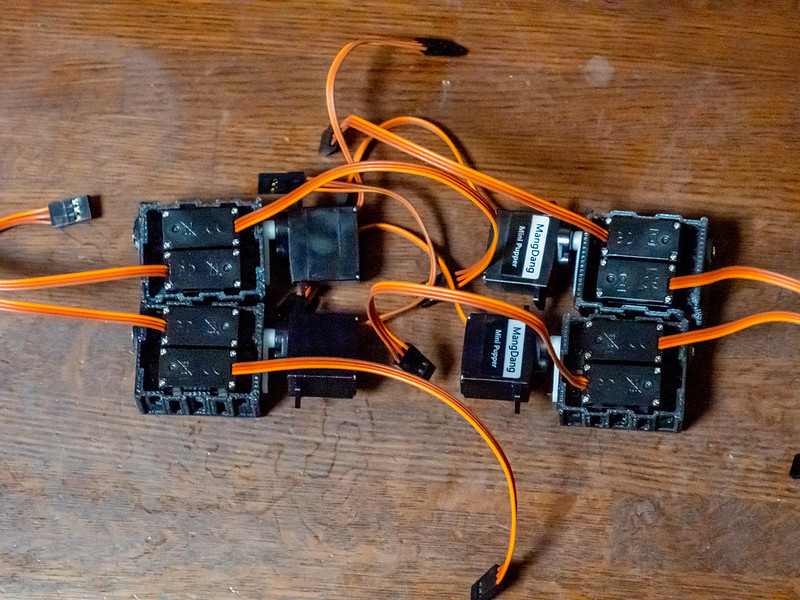
サーボモータはコードの長さが2種類あるので要注意です。
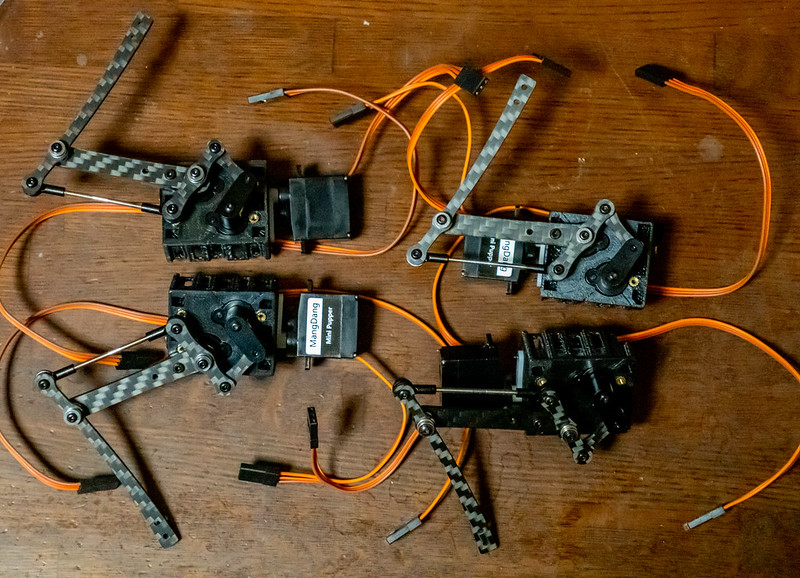
サーボモータと組み立てた脚を組み合わせ。1脚あたり3つのサーボモータで上手く動かす仕組みが分かりました。
意外と単純な仕組みですが、よくできています。

どこのサーボのコードかわかるようにしてフレームに組み立て。前面と後面の固定はガイドの皿ネジではなかったですね。

LCDディスプレイをつないだり、カスタム基盤やファン、Rasberry Piをつないだりします。
カスタム基盤にサーボのコードを間違いなく接続するのが大事。

あとは外装を整えるだけ、というときにトラブル発生。なんと脚の部品の一部が破損してしまいました。
まさか、これで終了か・・・!?と焦りましたが、

問い合わせたら、部品を着払いで送ってくれるとのこと。部品代は無料でした。
これはうれしいですね。部品は宅急便コンパクトですぐに届きました。ありがとうございました。

部品を交換して無事修復。

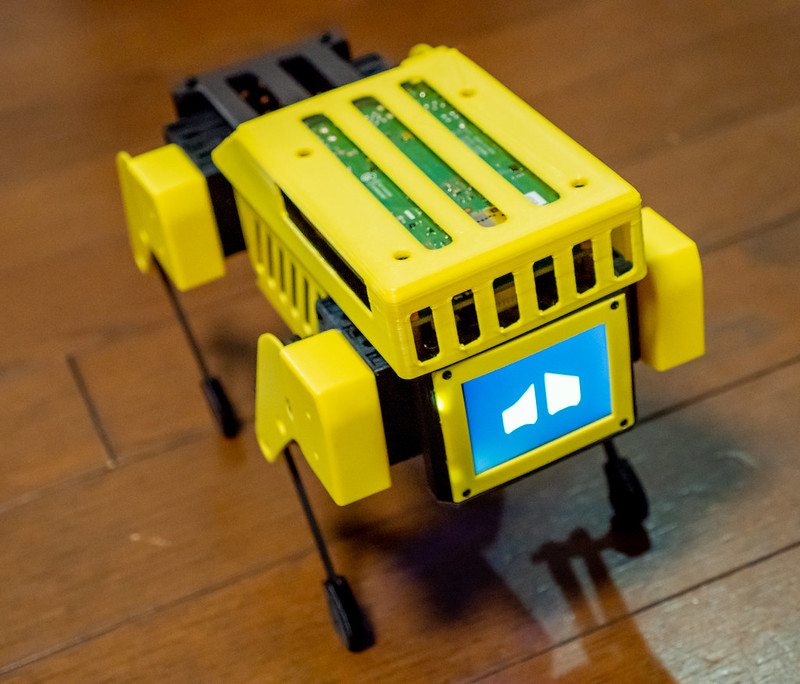
外装を取り付けて完成しました!


さて、ちゃんと動くかなと思いつつバッテリーの電源を入れて起動。

Rasberry Piの操作のために、microHDMIケーブル、ディスプレイ、USBキーボード、USBマウスが必要です。
最初画面が出たり消えたりでうまく表示されなくて焦りましたが、自動で4K表示になっていたためでした。ディスプレイ設定を画面が映ったタイミングでなんとかフルHDに変えると安定しました。ワイヤレスUSBキーボード・マウスも使えましたが、パスワード入力や変更だけは有線USBキーボードを使う必要がありました。

まずはサーボのキャリブレーションが必要です。Calbration Toolを使って、脚がうまく45度の角度で揃うように調整します。
これがなかなか難しかったですね。

PS4コントローラーのSHAREボタンとPSボタンを同時に長押ししてペアリングモードにすると、しばらくするとMini Pupperに自動接続。コントローラーでMini Pupperを操作できるようになります。
歩いたり

回ったり

姿勢を変えたり

とりあえず問題なく動くことが分かって安心しました。

無線LANを設定して、Macからsshで接続したり、VNC(リモートデスクトップ)でアクセスしたりもできました。
リモートデスクトップの設定はガイドに書かれてなかったのでメモしておくと、Ubuntuの設定でSharing>Screen SharingをActiveにして、パスワードなどを入力。MacのFinderで移動>サーバへ接続 で書かれていた「vnc://〇〇」を入力してパスワードを入れればOK。
とりあえず、PS4コントローラーで動くところまでできました。まだまだROSやLiDAR使ったり、カメラ使ったりと色々と遊んでいきたいと思います。
